
またも、小包が届きました。今度は海外からです。0xF8C2

アメリカ合衆国はイリノイ州、シカゴ近傍のダウナーズグローブというところから。
(画像は、TrossenRobotics社さんから拝借)
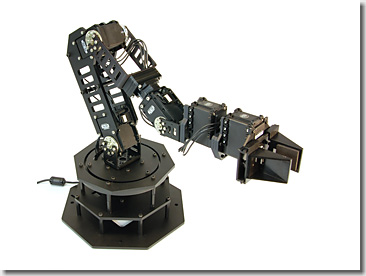
中身はこちら。TrossenRobotics社の教育用アームロボット、「WidowX Robot Arm Kit Mark II」です。(1,499.95ドル、約172,500円)
同社からは、「PhantomX Pincher Robot Arm」というエントリーモデル、「PhantomX Reactor Robot Arm」というミッドレンジモデルなどがラインナップされていますが、この「WidowX Robot Arm Kit Mark II」は、それらの中でも最も性能の高い、ハイエンドモデルとなっています。
さらに、「Mark II」という名のとおり、初代モデルより、「アクチュエータ」(サーボモータ)や「アクチュエータ制御コンピュータ」などが改良されています。
(画像は、TrossenRobotics社さんから拝借)
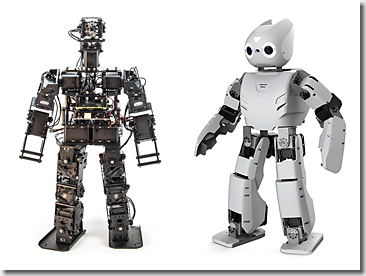
ちなみに、同社からは、いくつかの「ヒューマノイド」(人型ロボット)もラインナップされています。

さて、まずは開封の儀。

整然と箱詰めされているため、それほど部品点数が多くないように見えますが、実は、ものすごい数のパーツが詰め込まれています。
Parts Listに基づいて、不足部品がないかどうかをチェックします。

間接部などを駆動するためのアクチュエータです。
左側から、「MX-64T」(299.90ドル)、「MX-28T」(219.90ドル)、「AX-12A」(44.90ドル)です。

当然ながら、アクチュエータの大きさに合わせて、トルク特性などが異なります。
使用部位に合わせて、使い分けられています。
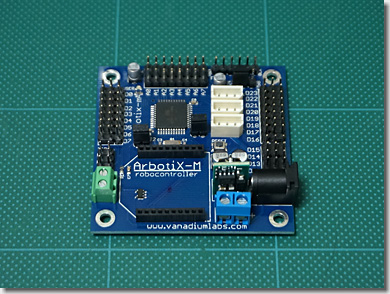
Arduinoベースのアクチュエータ制御コンピュータ、「ArbotiX-M Robocontroller」です。(39.95ドル)
Xbeeを搭載し、ワイヤレスで制御することもできます。

こちらは、今回の“キモ”となる、旋回ベアリング、「140mm Slewing Bearing」です。(19.95ドル)
「旋回ベアリング」とは、パワーショベルやクレーンなど、旋回構造を持つ建設機械に使われている部品です。
実は、今回の組立キットの中で、この部品だけ欲しかったといっても過言ではありません。
#この部品がどのように使われるかは、乞うご期待。0xF9F8
それでは、組み立てを始めます。0xF9BD
基本的には、Arm Assembly Guideに基づいて組み立てていけば、特段、難しいところはありません。パーツの構造、メカの機構を理解しながら進めても、一日あれば十分に組み立てられると思います。
ここでは、Arm Assembly Guideには書かれていない、組み立てながら思い付いたいくつかの工夫点について紹介します。
まず、1点目です。
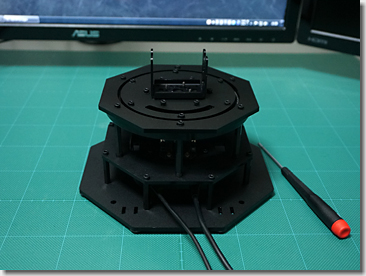
こちらは、アームロボットの基台です。一番上に、前述の「旋回ベアリング」が取り付けられています。
アームロボットを構成する黒色の部品は、アクリル板をレーザー加工したもので、非常に高い精度で成型されています。部品同士をボルトで固定していっても、ほぼガタツキなく組み上げることができます。
ただ、この旋回ベアリングを含む部品群については、少し慎重に組み上げました。
旋回ベアリングは、見てのとおり、「外周部」と「内周部」とがあります。外周部は、6本のボルトで基台に固定され、内周部は、その中心に、旋台を回転させるためのアクチュエータ(MX-28T)が固定されます。
このアクチュエータ周りをもう少し詳しく説明すると、2枚のアクリル板を重ね、アクチュエータに8本のボルトで固定し、さらに1枚のアクリル板を重ね、内周部に6本のボルトで固定します。
アクリル板は、高い精度で加工されているため、基本的には、旋回ベアリング(およびアクチュエータ)の回転中心が出ていると思いますが、少しでもズレていると、旋台の回転が渋くなってしまうことから、つぎのようにして回転中心を出すようにしました。
といっても、大して難しいことをした訳ではありません。
外周部と内周部を固定するボルトを緩く締めておき、アクチュエータにIDを振る際に使うツール(dynaManager)を用いて、アクチュエータを何回転かグリグリ動かします。
これにより、ボルトの固定穴の“遊び”の部分を上手く使って、旋台の回転中心が出るようにしました。
(その後、ボルトをしっかり締め込みます)
つづいて、2点目です。
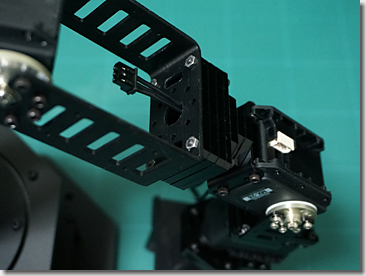
こちらは、第2関節(MX-64T)と第3関節(MX-28T)との間です。アクチュエータ同士を繋ぐケーブルを通せるような穴が3ヶ所ほど空いていますが、いずれも3Pコネクタのアタマが大きく、ケーブルを通すことができません。
そこで、いつもの「コネクタ分解ワザ」を使って3Pコネクタのアタマを分離し、ケーブルを真ん中の穴に通してから、3Pコネクタを元に戻しました。
これにより、関節を閉じた際にも、ケーブルの余長が外にモワッと広がることがなくなりました。

3点目です。
こちらは、エンドエフェクタ(物体をつまむ部分)です。
基本的には、Parallel Gripper Assembly Guideに基づいて組み立てていくことになりますが、グリッパレールにグリッパハンドを組み込んだところ、動きが非常に渋いことが分かりました。
プラスチック樹脂(こちらはアクリルではなく、ABS)の成型精度が非常に高く、わずかなグラツキもないのですが、その分、動きが渋くなってしまっているようです。
そこで、各部に少量、「シリコングリス」を塗布しておきました。
このシリコングリスは、自動車などの機械用ですが、プラスチック樹脂なども冒さないため、安心して使うことができます。
これにより、エンドエフェクタの各部がスムースに動くようになりました。

ということで、教育用アームロボット、「WidowX Robot Arm Kit Mark II」、組み立て完了しました。
ArduinoのSketchからチェック用のプログラムを起動し、各部の動きを確認します。
起動すると、このような感じで動きます。
#で、職人が、これをこのまま使う訳もなく・・・。0xF9CF
(つづく)
 SOARISTO at 13:41:08
|
Comment(0)
|
Trackback(0)
SOARISTO at 13:41:08
|
Comment(0)
|
Trackback(0)Link URL: https://www.soaristo.org/blog/archives/2016/02/160220.php
Post Comment