前回の続きです。
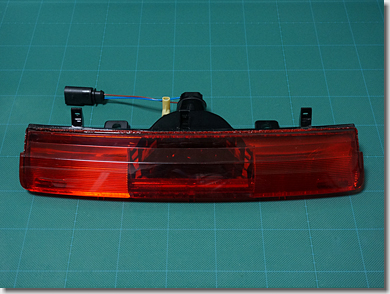
超高輝度赤色LEDを使用したLEDアレイができたところで、「リヤセンターフォグランプユニット」に組み込む準備をします。
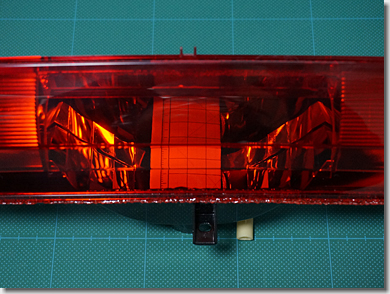
まずは、小学生の時から御用達の“工作用紙”を使って、「リヤセンターフォグランプユニット」内部の採寸をします。
天地高さは、40mmを確保できそうです。
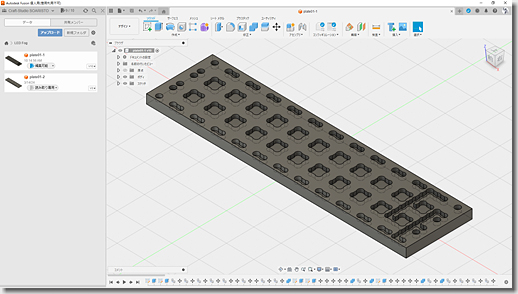
見当が付いたところで、いつものとおり、Autodesk Fusion 360でサクッと設計します。
| 2 Related Entries | |
 超高輝度LEDリヤフォグランプの製作(1) - Audi R8編 | |
Posted by  SOARISTO at 10:22:54
|
Comment(0)
|
Trackback(0)
SOARISTO at 10:22:54
|
Comment(0)
|
Trackback(0)
Link URL: https://www.soaristo.org/blog/archives/2024/03/240316.php
SOARISTO at 10:22:54
|
Comment(0)
|
Trackback(0)Link URL: https://www.soaristo.org/blog/archives/2024/03/240316.php